Системот за транспорт со беспилотни патеки за подземни рудници

Системски функции
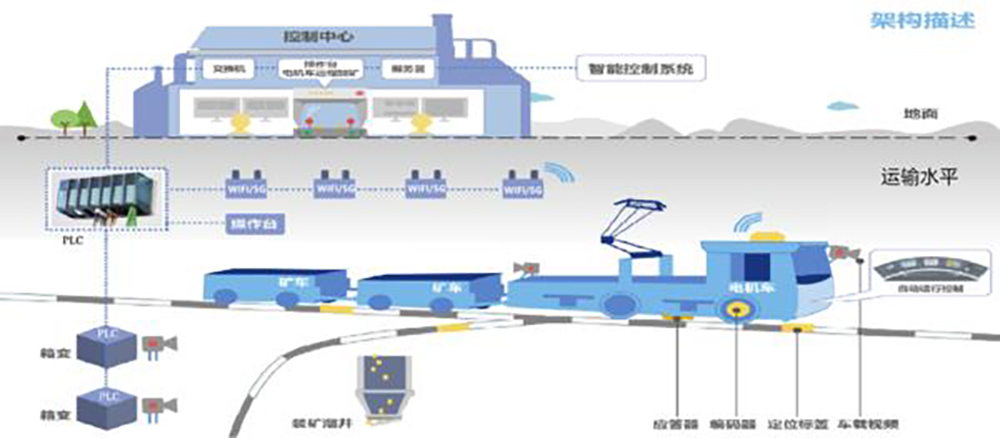
Системот за електрична локомотива без возач се состои од систем за автоматско работење (ATO), контролна единица PLC, единица за прецизно позиционирање, интелигентна единица за издавање, единица за безжична комуникациска мрежна единица, централизирана контролна единица за затворање со прекинувачки сигнал, видео мониторинг и видео ВИ систем и контролен центар.
Краток опис на функцијата
Целосно автоматско работење на крстарење:според теоријата на крстарење со фиксна брзина, според фактичката состојба и барањата на секоја точка од транспортното ниво, моделот за крстарење на возилото е конструиран за да го реализира автономното прилагодување на брзината на патување од страна на локомотивата.
Прецизен систем за позиционирање:прецизното позиционирање на локомотивата се постигнува со помош на комуникациска технологија и технологија за препознавање светилници и сл., со автоматско подигнување на лакот и автономно прилагодување на брзината.
Интелигентно испраќање:Преку собирање податоци како што се нивото на материјалот и степенот на секоја шахта, а потоа според положбата во реално време и работниот статус на секоја локомотива, локомотивата автоматски се доделува за работа.
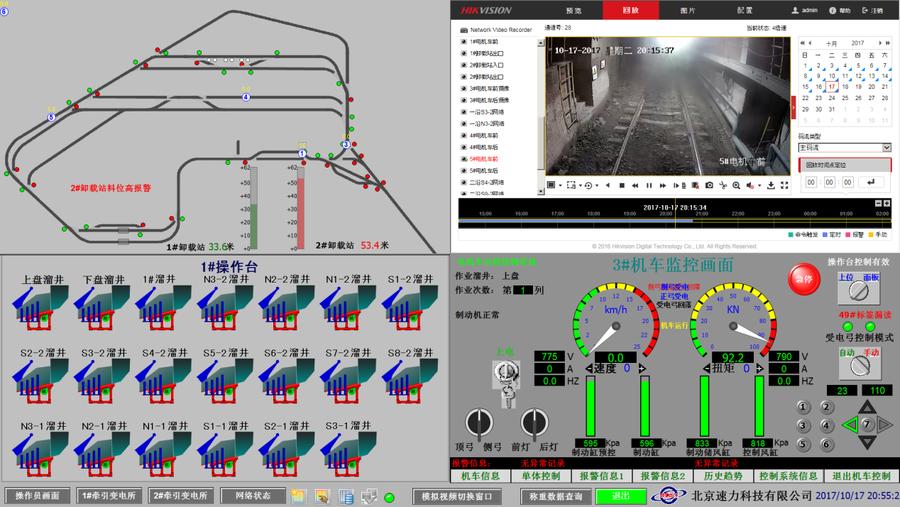
Далечинско рачно вчитување:Далечинско рачно полнење може да се постигне на површината со контролирање на опремата за товарење.(Опционален систем за целосно автоматско вчитување)
Откривање пречки и безбедносна заштита:Со додавање на високопрецизен радарски уред пред возилото за да се постигне откривање на луѓе, возила и карпи кои паѓаат пред возилото, за да се обезбеди безбедно растојание на возилото, возилото автономно завршува голем број операции како што се озвучување сирената и сопирањето.
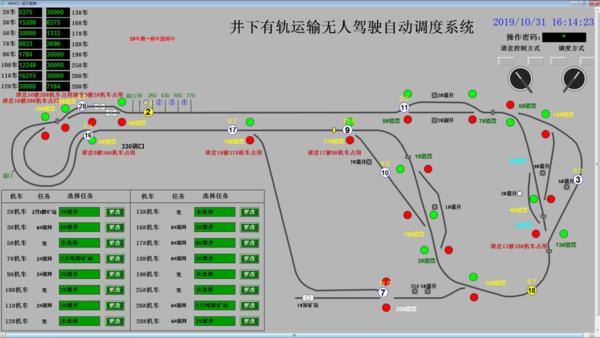
Функција за статистика на производство:Системот автоматски врши статистичка анализа на параметрите за трчање на локомотивите, траекториите на движење, дневниците на команди и завршувањето на производството за да формира извештаи за производство на трчање.
Определување на системот.
Автоматско работење на системи за подземен железнички транспорт.
Пионерски нов начин на работа за подземна изборна локомотива без возач.
Реализација на мрежно, дигитално и визуелно управување со подземни железнички транспортни системи.

Анализа на придобивките од ефективноста на системот
Без надзор под земја, оптимизирање на моделите на производство.
Рационализирање на бројот на луѓе кои работат и намалување на трошоците за работна сила.
Подобрување на работната средина и подобрување на внатрешната безбедност.
Интелигентни оперативни механизми за управување со промените.
Економски придобивки.
-Ефикасност:зголемена продуктивност со една локомотива.
Стабилно производство преку интелигентна дистрибуција на руда.
- Персонал:возач на локомотива и оператор за ослободување мини во едно.
Еден работник може да контролира повеќе локомотиви.
Намалување на бројот на персоналот на позициите на местото на истовар на рудникот.
-Опрема:намалување на трошоците за човечка интервенција на опремата.
Менаџмент придобивки.
Анализа на податоците за опремата за да се овозможи претходно сервисирање на опремата и намалување на трошоците за управување со опремата.
Подобрете ги производните модели, оптимизирајте го персоналот и намалете ги трошоците за управување со персоналот.





